Research highlights
(For a full list of publications, please see below or go to Google Scholar, ORCID, ResearcherID)
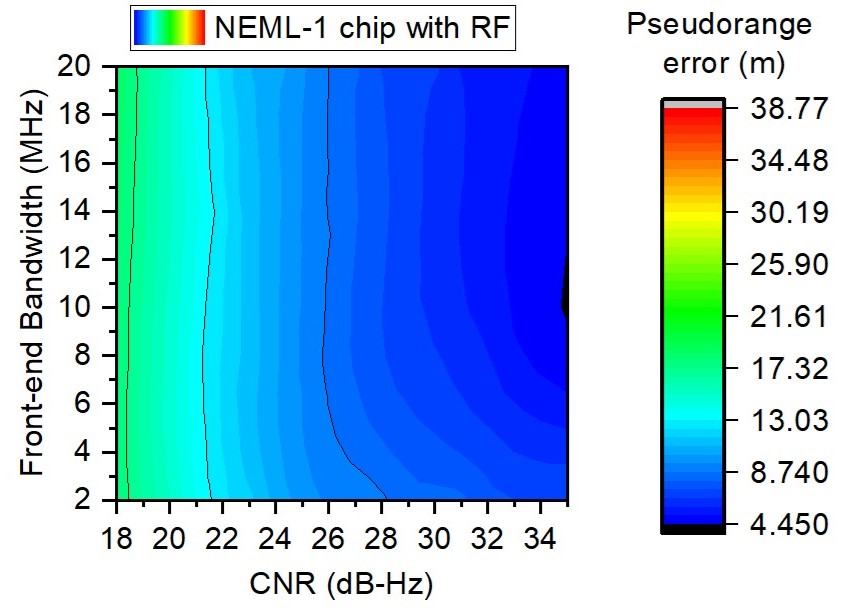
This study proposes a random forest (RF)-based multipath parameter estimator to estimate multipath parameters such as code delay and amplitude. The RF-based estimator demonstrates higher robustness compared to the classic multipath estimator, MEDLL. Results demonstrate that the multipath mitigation performance of the proposed method is less affected by the front-end bandwidth setting of received signals and noise randomness.
X. Qi, B. Xu, Z. Wang, and L.-T. Hsu
GPS Solutions, 28(126), 20 May 2024
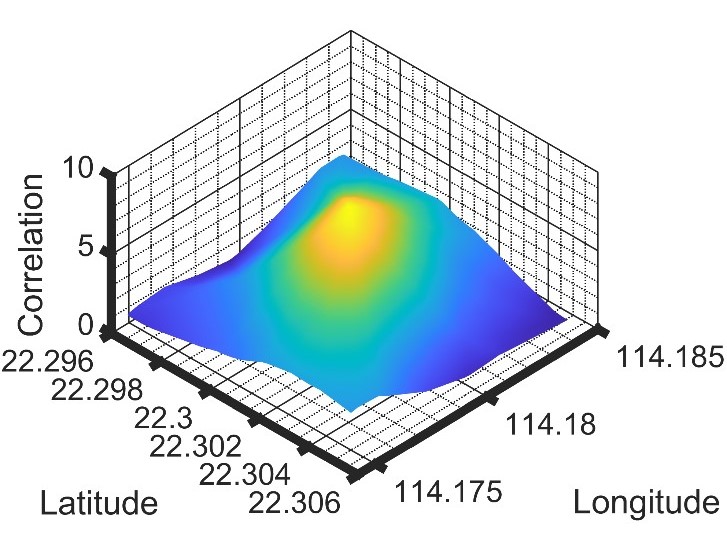
We present a novel grid-based maximum likelihood estimation (MLE) algorithm based on DPE by making use of pseudorange measurements to obtain the correlogram on a predefined searching space. Unlike the traditional DPE, which performs correlations at the intermediate frequency (IF) level, correlations herein are done by directly comparing the code phase of each candidate position with the incoming pseudorange. Results show that the proposed method manages to acquire MP mitigation capability of DPE and outperforms 2SP by up to around 23% in the tested urban datasets and 91% in the simulation data, at a much-reduced computational time.
S. Vicenzo, B. Xu, H. Xu and L.-T. Hsu
GPS Solutions, 28(83), 11 Mar 2024
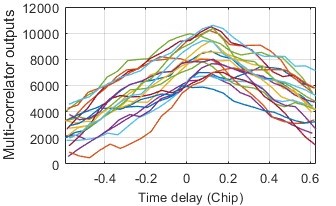
In this work, we analyzed the NLOS effects on both STLs and VTLs mathematically, based on which an NLOS detection and correction algorithm using the VTL was proposed. We used the metric of equivalent noise bandwidth of VTL to find potential NLOS reception and then confirmed it using the time delay of multicorrelator peaks and code discriminator output. The NLOS-induced measurement error was furtherly corrected before being fed forward into the Kalman filter.
B. Xu, Q. Jia, L.-T. Hsu
IEEE Transactions on Instrumentation and Measurement 69(7):4604-4619, 2020
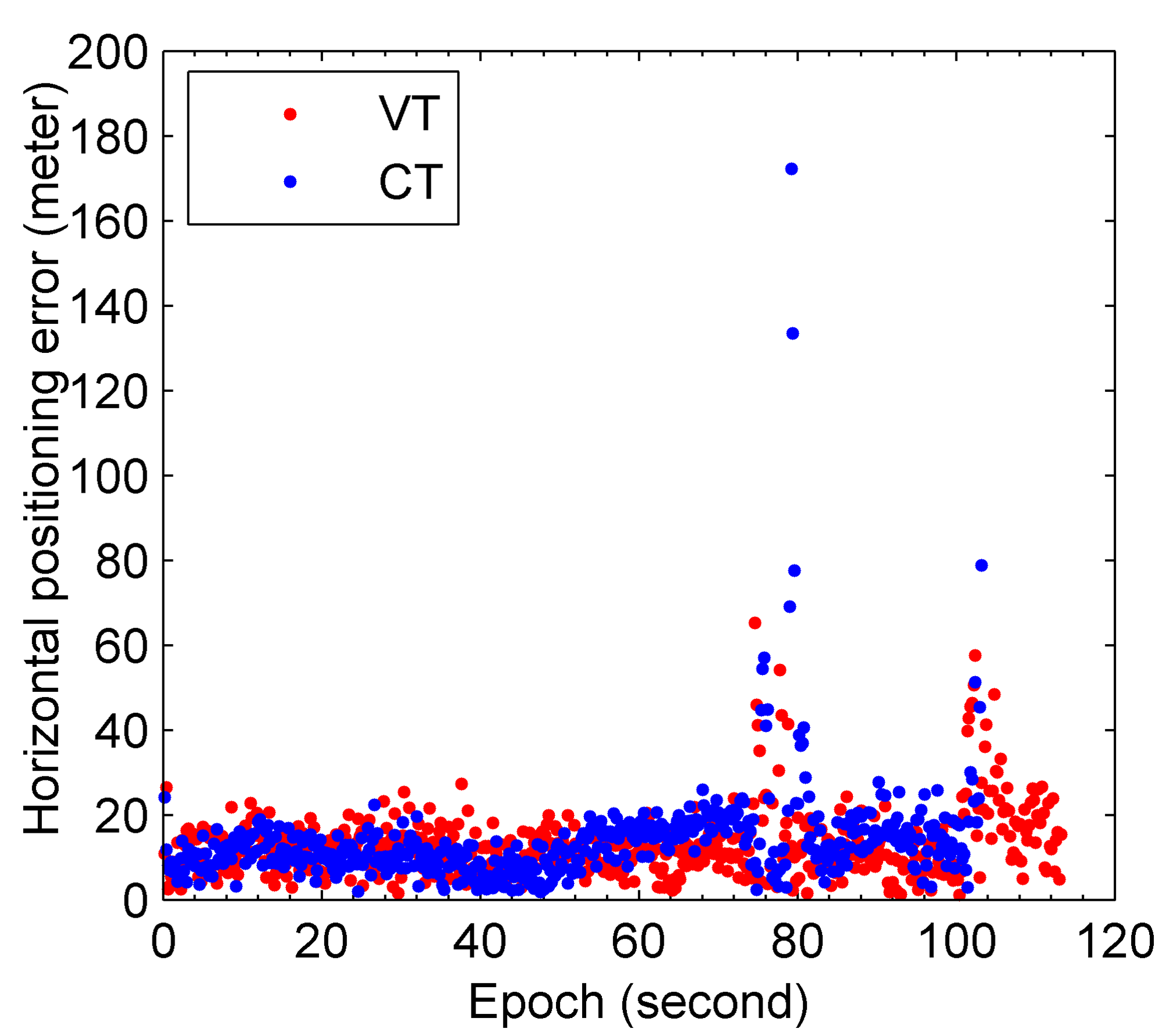
We developed open-source MATLAB code for GPS VT SDR to enable researchers and scientists to investigate its pros and cons in various applications and under various environments. To achieve this goal, we developed an “equivalent conventional tracking (CT)” SDR as a baseline to compare with VT. The GPS positioning estimator of this equivalent CT is based on an extended Kalman filter (EKF), which has exactly the same state, system, and carrier measurement models and noise tuning method as VT. This baseline provides users with a tool to compare the performance of VT and CT on common ground.
B. Xu, L.‑T. Hsu
Research interests
- GNSS signal processing
- Low Earth orbit satellite positioning, navigation, and timing (LEO PNT)
- Cellular signal positioning
- GNSS radio frequency interference detection and localization
Journal Papers
2025
Characterization and Validation of GNSS Multipath-Induced Doppler Measurement Error
J. Fang, L. Zhang, G. Zhang, B. Xu and L.-T. Hsu
IEEE Transactions on Aerospace and Electronic Systems, 61(2), April 2025.
Analysis of multipath effects on LEO ranging-based positioning using BPSK and BOC signals in urban areas
Q. Zhang and B. Xu
Advances in Space Research, 75(3), 1 Feb 2025.
2024
Random forest-based multipath parameter estimation
X. Qi, B. Xu, Z. Wang, and L.-T. Hsu
GPS Solutions, 28(126), 20 May 2024.
GNSS Direct Position Estimation-inspired Positioning with Pseudorange Correlogram for Urban Navigation
S. Vicenzo, B. Xu, H. Xu and L.-T. Hsu
GPS Solutions, 28(83), 11 Mar 2024.
Enhancing Positioning in GNSS Denied Environments by Synthesizing Measurements for EKF-based GNSS/IMU Fusion
K. Iyer, A. Dey, B. Xu, N. Sharma and L.-T. Hsu
IEEE Transactions on Vehicular Technology, 73(6), June 2024.
A Novel SINS/DVL Integrated Navigation Method Based on Different Track Models for Complex Environment
D. Wang, B. Wang, H. Huang, B. Xu, H. Zhang
IEEE Transactions on Instrumentation & Measurement, 73, 4 Mar 2024.
2023
Robust GNSS Positioning using Unbiased Finite Impulse Response Filter
J. Dou, B. Xu, and L. Dou
Remote Sensing, 15(18):4528, 2023.
Performance Evaluation of Vectorized NavIC Receiver Using Improved Dual-Frequency NavIC Measurements
A. Dey, K. Iyer, B. Xu, N. Sharma and L.-T Hsu
IEEE Transactions on Instrumentation and Measurement, 72, 8505213, 2023.
A post-correlation graphical way for continuous GNSS spoofing detection
C.-L Tsang, Y. Luo, B. Xu and L.-T. Hsu
Journal of Aeronautics, Astronautics and Aviation, 55(2), 169-184, 2023.
2022
Analytic Models of a Loosely-coupled GNSS/INS/LiDAR Kalman Filter considering Update Frequency under a Spoofing Attack
J. Chang, L. Zhang, L.-T. Hsu, B. Xu, F. Huang and D. Xu
IEEE Sensors Journal, 22(23), 23341-23355, DOI 10.1109/TIM.2022.3184357, 1 December 2022.
Hyperparameter Optimization of Neural Networks Based on Q-learning
X. Qi and B. Xu
Signal, Image and Video Processing, published online, DOI 10.1007/s11760-022-02377-y, 8 Oct 2022
A Robust Nonlinear Filter Strategy Based on Maximum Correntropy Criterion for Multi-GNSS and Dual-Frequency RTK
J. Liu, T. Liu, Y. Ji, M. Sun, M. Lyu, B. Xu, Z. Lu, and G. Xu
Remote Sensing, 14(18), 4578, DOI 10.3390/rs14184578, 13 Sep 2022
FPS-Fast Path Planner Algorithm Based on Sparse Visibility Graph and Bidirectional Breadth-First Search
Q. Li, F. Xie, J. Zhao, B. Xu, J. Yang, X. Liu, and H. Suo
Remote Sensing, 14(15), 3720, DOI 10.3390/rs14153720, 3 August 2022
Data Denoising Based on Hadamard Matrix Transformation and Rayleigh Quotient Maximization, Application to GNSS Signal Classification
J. Yue, B. Xu, and L.-T. Hsu
IEEE Transactions on Instrumentation and Measurement, DOI 10.1109/TIM.2022.3184357, 20 June 2022
GNSS Code Multipath Time-frequency Analysis Using Wavelet-based Synchrosqueezing Transform in Urban Environments
A. Dey, B. Xu, X. Lu, and N. Sharma
IEEE Geoscience and Remote Sensing Letters, published online, DOI 10.1109/LGRS.2022.3167738, 18 April 2022
Vector Tracking Based on Factor Graph Optimization for GNSS NLOS Bias Estimation and Correction
C. Jiang, Y. Chen, B. Xu, J. Jia, H. Sun, T. Wang, Z. Duan, and J. Hyyppä
IEEE Internet of Things Journal, published online, DOI 10.1109/JIOT.2022.3150764, 11 February 2022
Carrier-Aided Dual Frequency Vectorized Tracking Architecture for NavIC Signals
A. Dey, K. Iyer, B. Xu, N. Sharma, and L.-T. Hsu
IEEE Transactions on Instrumentation and Measurement, 71:1-13 (2022)
2021
Probabilistic Approach to Detect and Correct GNSS NLOS Signals Using an Augmented State Vector in the Extended Kalman Filter
C. Jiang, B. Xu, and L.-T. Hsu
GPS Solutions 25, 72 (2021)
Impact assessment of the asynchronous clocks between reference and user receivers in differential pseudolite navigation system
J. Dou, B. Xu, L. Dou
IEEE Sensors Journal 21(1):403-411 (2021)
A cost-effective beam forming structure for global navigation satellite system multipath mitigation and its assessment
Q. Jia, L.-T. Hsu, B. Xu, and R. Wu
The Journal of Navigation 74:2 (2021)
GNSS RUMS: GNSS Realistic Urban Multiagent Simulator for Collaborative Positioning Research
G. Zhang, B. Xu, H.-F. Ng, L.-T. Hsu
Remote Sensing 13(4):544 (2021)
2020
Vector Tracking Loop-Based GNSS NLOS Detection and Correction: Algorithm Design and Performance Analysis
B. Xu, Q. Jia, L.-T. Hsu
IEEE Transactions on Instrumentation and Measurement 69(7):4604-4619 (2020)
Extending Shadow Matching to Tightly-Coupled GNSS/INS Integration Systems
G. Zhang, W. Wen, B. Xu, L.-T. Hsu
IEEE Transactions on Vehicular Technology 69(5):4979-4991 (2020)
Integrity monitoring using multi-GNSS pseudorange observations in the urban environment combining ARAIM and 3D city models
A. El-Mowafy, B. Xu, L.-T. Hsu
Journal of Spatial Science, DOI 10.1080/14498596.2020.1734109
2019
An intelligent joint filter for vector tracking loop considering noise interference
J. Dou, B. Xu, L. Dou
Optik 22:164984 (2020)
Open-source MATLAB code for GPS vector tracking on a software defined receiver
B. Xu, L.‑T. Hsu
GPS Solutions 23, 46 (2019)
Intelligent GPS L1 LOS/Multipath/NLOS Classifiers Based on Correlator-, RINEX- and NMEA-Level Measurements
B. Xu, Q. Jia, Y. Luo, L.‑T. Hsu
Remote Sens. 11(16):1851 (2019)
Research on Time-Correlated Errors Using Allan Variance in a Kalman Filter Applicable to Vector-Tracking-Based GNSS Software-Defined Receiver for Autonomous Ground Vehicle Navigation
Y. Luo, J. Li, C. Yu, B. Xu, L. You, L.-T. Hsu
Remote Sens. 11(9):1026 (2019)
A GPS Spoofing Generator Using an Open Sourced Vector Tracking-Based Receiver
Q. Meng, L.-T. Hsu, B. Xu, X. Luo
Sensors 19(18):3993 (2019)
Performance assessment of GNSS scalar and vector frequency tracking loops
J. Dou, B. Xu, L. Dou
Optik 202:163552 (2019)
2018
GNSS IF Signal Simulation Considering Oscillator Phase Noise
B. Xu, L. Dou
The Journal of Navigation 71(4):805-820 (2018)
Benefits of long coherent integration for CZT-based GPS signal acquisition
B. Xu, L. Dou
Electronics Letters 54(16):995-997 (2018)
2017
Novel acquisition of global positioning system signals based on parameter prediction and the chirp z-transform
B. Xu, L. Dou
Proceedings of the Institution of Mechanical Engineers, Part G, Journal of Aerospace Engineering 231(8):1391-1401 (2017)
Conference Papers
Multipath Parameter Estimation Based on Reinforcement Learning
X. Qi and B. Xu
ION GNSS+ 2024, Baltimore, Maryland, September 16-20, 2024.
Design of OFDM Navigation Signal and Receiver for Accurate Ranging Estimation in a Power-Limited CubeSat Transmitter
Y. He, S. Li, and B. Xu
ION ITM 2024, Long Beach, California, January 23-25, 2024.
Modeling and Validation of GNSS Multipath-Induced Doppler Tracking Error
J. Fang, L. Zhang, G. Zhang, B. Xu, and L.-T. Hsu
ION ITM 2024, Long Beach, California, January 23-25, 2024.
Machine Learning Assisted GNSS Direct Position Estimation for Urban Environments Applications
S. Vicenzo, X. Qi, B. Xu, and L.-T. Hsu
ION ITM 2024, Long Beach, California, January 23-25, 2024.
NLOS Effect on LEO Doppler Positioning: A Case Study in Hong Kong
Q. Zhang, L. Zhang, H. Xu, G. Zhang, and B. Xu
2023 IEEE International Symposium On Antennas And Propagation (ISAP), Kuala Lumpur, Malaysia, 30 October 2023 - 02 November 2023.
Machine learning assisted multipath signal parameter estimation and its evaluation under weak signal environment
X. Qi and B. Xu
2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, April 24-27, 2023.
A Graphical Way of Continuous GNSS Spoofing Detection at the Baseband Signal Level
J. Fang, J. Yue, and B. Xu
ION ITM 2023, Long Beach, California, January 24-26,2023.
Performance Improvement and Assessment of NavIC Software Receiver
A. Dey, P. Singh, N. Sharma, B. Xu, and L.-T. Hsu
2022 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Gandhinagar, Gujarat, India, 18-21 December 2022.
3DMA Sky Visibility Matching: An Example using a Simulated LEO Constellation
H. Xu, B. Xu and L.-T. Hsu
ION ITM 2022, Long Beach, California, January 25-27, 2022
An Absolute-Position-Aided Code Discriminator Towards GNSS Receivers for Multipath Mitigation
Y. Luo, L.-T. Hsu, Y. Xiang, B. Xu, and C. Yu
ION GNSS+ 2021, St. Louis, Missouri, September 20-24, 2021
Intermediate Frequency Level GPS Multipath Simulator based on Vector Tracking and Ray-tracing
B. Xu, L.-T. Hsu, and T. Suzuki
ION ITM 2020, San Diego, California, January 21-24, 2020
NLOS Detection and Compensation using a Vector Tracking-based GPS Software Receiver
B. Xu and L.-T. Hsu
ION PNT 2019, Honolulu, Hawaii, April 8-11, 2019
Assessment of Ultra-Tightly Coupled GNSS/INS Integration System towards Autonomous Ground Vehicle Navigation Using Mobile-Phone IMU
Y. Luo, C. Yu, B. Xu, G.-J. Tsai, J. Li, Y. Li, N. El-Sheimy
IEEE International Conference on Signal, Information and Data Processing 2019, Chongqing, China, December 11-13, 2019
Performance of the Vector Tracking Loop Assisted by Desired Trajectory during Short Signal Outages
B. Xu, L. Dou
Proceedings of 2016 IEEE Chinese Guidance, Navigation and Control Conference August 12-14, 2016 Nanjing, China